新聞中心

為 ADAS 與自動駕駛實現長距離、高速影像傳輸
當自動駕駛車輛以高速行駛時,相機系統必須在毫秒級時間內將高解析度影像傳輸至運算平台,供 AI 進行決策。要在電磁干擾、震動與極端溫度等車用嚴苛環境下維持穩定的資料傳輸,必須採用專業技術——這正是 SerDes 相機系統的價值所在。
車用視覺的核心挑戰
傳統 MIPI CSI-2 介面原本是為消費性裝置內部的短距離連接而設計,在車用場景中會遇到關鍵限制:傳輸距離。CSI-2 雖然非常適合緊湊型電子產品,但車用相機往往需要長距離佈線——例如從前擋風玻璃附近的相機到位於後車廂的 ECU,距離可能跨越整個車身。平行介面需要大量導線且缺乏 EMI 防護,不適合電氣系統密集的車輛環境。此時,像 SerDes 與 MIPI A-PHY 這類長距離實體層技術就變得不可或缺。
什麼是 SerDes?
SerDes(Serializer-Deserializer,序列化器/反序列化器)是一種點對點通訊架構,用於在車用環境中實現長距離影像傳輸。其運作可分為三個階段:
- 序列化(Serialization):相機模組端的序列化器 IC 會將影像感測器的平行資料(通常為 8–16 lanes)轉換成高速序列位元流
- 傳輸(Transmission):序列資料透過單一條屏蔽線材(同軸或屏蔽雙絞線)傳輸;典型可達約 15 公尺,實際距離取決於資料率、線材品質、等化能力與晶片的通道預算
- 反序列化(Deserialization):ECU 端的反序列化器 IC 將序列資料還原為原本的平行格式,提供處理器輸入
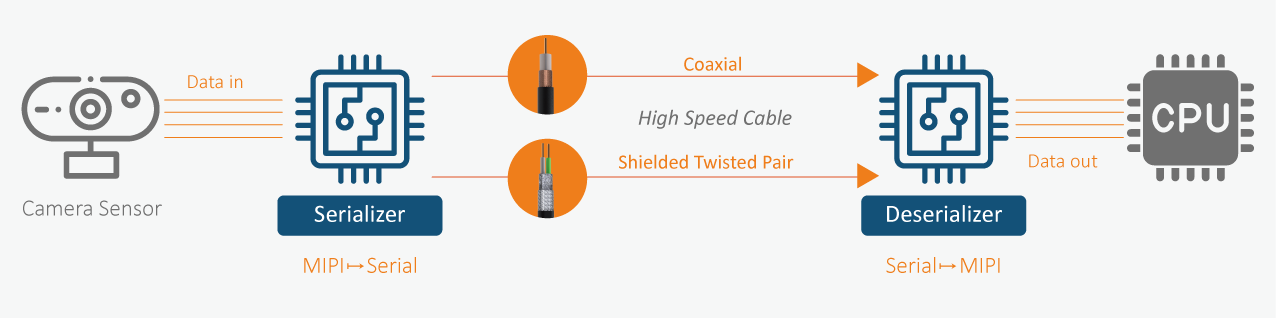
此架構可大幅降低線材數量,同時在嚴苛的車用環境中提供可靠傳輸。相較於必須佈署大量且易受電磁干擾影響的平行訊號線,SerDes 透過屏蔽線材上的差分/抗干擾傳輸方式,可有效抵抗車內點火系統、馬達與高功率電子設備所產生的雜訊。
SerDes 技術基礎
SerDes(序列化器/反序列化器)會將相機的平行資料轉換為高速序列資料流,以支援長距離且穩定的傳輸。在相機端,序列化器會把多 lane 的感測器資料編碼成單一路徑的高速序列位元流,透過同軸或屏蔽雙絞線送出;在主機端,反序列化器會把資料還原為處理器可接收的平行格式——整體處理可在微秒等級完成。
主要優勢:
- 長距離:典型傳輸距離約 15 公尺,若配合合適的線材規格、等化能力與晶片通道預算,仍可延伸至更長距離
- 抗 EMI:搭配屏蔽線材的抗干擾傳輸方式,提升在車內高雜訊環境的穩定性
- 雙向通訊:可同時承載影像資料與控制訊號
- 供電選項:以同軸為主的 SerDes 常見支援 PoC,可在單一線纜上同時傳輸電力與資料;差分雙絞線架構通常需要額外的供電配線,實際取決於平台需求與系統設計
- 低延遲:SerDes 連結本身的額外延遲極低(微秒等級),相較整體相機處理流程可視為非主要瓶頸
主流 SerDes 協定比較
| 協定 | 供應商 | 頻寬 | 最大距離 | 主要特性 |
|---|---|---|---|---|
| GMSL1 | Analog Devices | 1.5 Gbps | 典型約 15m | 第一代車用 SerDes |
| GMSL2 | Analog Devices | 6 Gbps | 典型約 15m | 多相機同步、支援 PoC |
| GMSL3 | Analog Devices | 10+ Gbps | 視實作而定 | 支援新一代高解析度 |
| FPD-Link III | Texas Instruments | 多 Gbps(依器件而異) | 典型約 15m | 原生 PoC、ADAS 導向 |
| FPD-Link IV | Texas Instruments | 多 Gbps(更高資料率) | 典型約 15m | 更高頻寬、車規強化 |
| MIPI A-PHY | MIPI Alliance | 可擴展速率 | 視實作而定 | 開放標準、多供應商支援 |
註:表列的頻寬為典型連結速率;實際可用吞吐量會受編碼方式、協定開銷與系統配置影響。
產業正逐步導入 MIPI A-PHY、ASA 等開放標準,以降低單一供應商依賴並提升互通性——這對擁有 10 年以上產品生命週期的車用系統尤其重要。
實體層選擇:同軸 vs. 屏蔽雙絞線
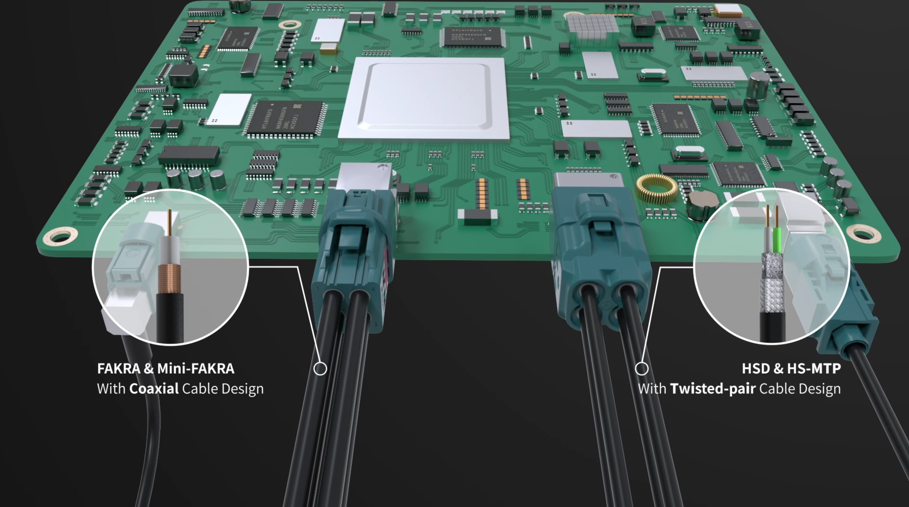
線材選型會直接影響系統表現。同軸線(50Ω)具備良好的高頻特性且常見支援 PoC,適合 FAKRA/Mini-FAKRA 系統;屏蔽雙絞線(100Ω 差分)在 EMI 抑制與走線彈性上表現更佳,常用於 HSD 與差分架構。
| 參數 | 同軸線 | 屏蔽雙絞線 |
|---|---|---|
| 阻抗 | 50Ω | 100Ω 差分 |
| 結構 | 中心導體 + 絕緣 + 屏蔽 + 外被 | 雙絞導體 + 屏蔽 + 外被 |
| 最佳適用 | 單端訊號、PoC 場景 | 差分訊號、高 EMI 環境 |
| 彎折/走線彈性 | 中等 | 較高 |
| PoC 支援 | 常見(PoC 在同軸系統中普遍採用) | 可行(依實作而定/需權衡設計取捨) |
| 典型應用 | FAKRA、Mini-FAKRA | HSD、差分高速資料 |
四種車用 SerDes 連接器
| 特性 | FAKRA | Mini-FAKRA | HSD | 高速雙絞線 |
|---|---|---|---|---|
| 架構 | 50Ω 同軸 | 50Ω 同軸 | 100Ω 差分 | 100Ω 差分 |
| 頻率 | 最高 6 GHz | 最高 20 GHz | 針對差分高速訊號最佳化(如 LVDS) | 可支援多 Gbps |
| 資料率 | 多 Gbps(視系統設計而定) | 最高 28 Gbps | 依實作而定 | 依實作而定 |
| 尺寸 | 標準 | 縮小約 80% | 緊湊 | 緊湊 |
| 顏色編碼 | 是 | 是 | 可選/依供應商而異 | 依設計而異 |
| 標準/驗證 | 車廠(OEM)平台驗證要求(例如:依平台不同,可能適用 USCAR 相關測試期待) | |||
| 線材類型 | 50Ω 同軸 | 50Ω 同軸 | 100Ω STP/Quad | 100Ω STP |
| PoC 支援 | 原生 | 原生 | - | - |
| 典型應用 | 標準 ADAS | 高解析多相機 | LVDS 相機、資訊娛樂、車內專用差分高速連結 | 高 EMI 環境 |
| 溫度範圍 | -40°C 到 105°C | -40°C 到 105°C | -40°C 到 105°C | -40°C 到 105°C |
FAKRA(Fachkreis Automobil)連接器因其成熟可靠,廣泛用於以同軸為基礎的車用相機與 SerDes 連結。其 50Ω 同軸結構可支援最高 6GHz,足以滿足 1080p–4K 等常見應用需求。透過顏色編碼與機械防呆鍵位設計,可有效避免誤插——在大量生產的組裝線上尤其重要,例如以藍色、綠色、灰色等不同編碼區分 GPS、收音機與相機連接。
其卡扣式鎖定機構提供清楚的「卡入」回饋,並可在 -40°C 到 105°C 的連續震動環境下維持穩定連接。多層屏蔽設計可降低點火系統、音響擴大器與馬達驅動等干擾來源的影響。ISO 20860 的標準化也確保跨供應商在機械與電氣上的相容性。
隨著 4K/8K 相機導入加速,Mini-FAKRA 以約 80% 更小的尺寸提供 20GHz 頻寬(最高可達 28Gbps 的資料率),同時解決兩個核心問題:頻寬限制與 PCB 空間不足。其內建 CPA(Connector Position Assurance)機構可確保完全到位的插接,避免因未完全插入而造成反射增加、連結裕度下降。
HSD(High Speed Data)連接器針對低電壓差分訊號設計,提供 100Ω 阻抗控制。搭配屏蔽雙絞線或四芯雙絞(quad)線材,可用於 LVDS 相機連結以及車內差分高速資料連結。不同於 FAKRA 的同軸架構,HSD 的差分設計在串擾抑制與平衡傳輸方面具備優勢。
緊湊尺寸有利於高密度 PCB 佈局;同時配合車用供應鏈的驗證需求,可提升跨地區採購與供應彈性——對需全球化供應鏈的車廠而言尤其重要。
更進階的應用會採用 100Ω 差分雙絞線介面,以應對極端 EMI 環境。其幾何結構可在物理層面抵銷外部干擾,再加上更佳的彎折與走線彈性,適合空間受限的系統佈線。常見於高階 ADAS 平台、工業機器視覺與自主移動機器人等情境,需要在嚴苛電磁環境中維持多 Gbps 等級的可靠傳輸。
連接器選型指引
| 評估面向 | FAKRA | Mini-FAKRA | HSD | 高速雙絞線 |
|---|---|---|---|---|
| 解析度支援 | 1080p-4K | 4K-8K+ | 依系統而定 | 依系統而定 |
| 空間效率 | ⭐⭐⭐ | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐ |
| 成本 | ⭐⭐⭐⭐⭐ | ⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐ |
| EMI 表現 | ⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐⭐ |
| PoC 支援 | 原生/常見 | 原生/常見 | - | - |
| 市場成熟度 | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐ |
選型邏輯:
- 1080p–4K 標準系統 → FAKRA(成熟、具成本效益)
- LVDS/差分架構 → HSD(100Ω 最佳化)
- 4K–8K 多相機平台 → Mini-FAKRA(頻寬 + 空間)
- 極端 EMI 環境 → 高速雙絞線(最高抑制能力)
關鍵:線材阻抗必須與連接器規格匹配——FAKRA/Mini-FAKRA 使用 50Ω 同軸,HSD/雙絞線系統使用 100Ω STP。並建議參考 SerDes 晶片供應商的認證料表與參考設計完成整鏈驗證。
系統視角:SerDes FAKRA 相機架構的實務應用
在理解底層技術後,從系統整合的角度來看,一套完整的 SerDes FAKRA 相機系統如何運作會更有助於掌握設計重點。
以搭載 360 度環視系統的車輛為例,車身周圍通常會配置 4 到 6 顆廣角相機,涵蓋前方、後方與兩側視野。每個相機模組整合影像感測器與 SerDes 序列化器 IC。感測器擷取的影像資料會先被序列化器轉換為高速序列資料流,再透過 FAKRA 連接器,經由 50Ω 同軸線纜進行傳輸。
這些同軸線纜沿車身佈線,最終匯聚到電子控制單元(ECU),ECU 通常位於中控台或後車廂等位置。在 ECU 端,每條線纜會對應連接到一個 FAKRA 介面,訊號進入 SerDes 反序列化器。反序列化器多半整合於專用影像處理板上,負責將序列資料還原為平行格式,並透過 MIPI CSI-2 介面送往主處理器。
主處理器通常是面向視覺與 AI 工作負載的車規運算平台,具備 GPU 與 AI 加速能力,可即時處理多路高解析度影像串流。
從資料流程看,這套架構看似複雜,但端到端延遲其實非常低。從感測器成像到處理器端資料可用,延遲通常僅為數毫秒。
對 ADAS 而言,低延遲至關重要。當車速為 80 km/h 時,車輛每毫秒約前進 2.2 公分。若系統延遲過高,當 AI 演算法偵測到障礙物時,車輛可能已額外前進數公分——在緊急情境下,這可能就是安全停車與發生碰撞之間的差距。
在實際部署中,SerDes FAKRA 相機系統可支援多種 ADAS 功能。前視相機可用於車道偏離警示與自適應巡航控制,需要精準辨識車道線與前車距離;側視相機支援盲點偵測,在駕駛啟動變換車道時監測鄰側車道。
後視相機除了倒車顯影,也逐漸整合行人偵測與自動緊急煞車等功能。
更進階的應用包括 360 度環視系統,需要將 4 路或更多相機影像進行即時拼接。這不只是畫面合成,還必須進行鏡頭畸變校正、考量安裝角度差異,並確保各路相機輸入具備精準的時間同步,才能產生無縫的俯視畫面。
此類系統對大型車輛特別有價值,可在低速行駛與停車時顯著降低碰撞風險。
值得注意的是,SerDes FAKRA 架構的應用早已不侷限於乘用車。在現代倉儲與物流環境中,自主移動機器人(AMR)仰賴可靠的視覺系統進行導航與避障。
這類平台常見相機安裝於前端,而控制電腦位於底盤中央,同樣存在長距離傳輸的需求。工業機器視覺系統也越來越多採用 SerDes 架構,特別是相機需遠離控制櫃安裝,或作業環境具有高電磁干擾的情境。
在系統開發與驗證階段,SerDes 技術同樣扮演關鍵角色。專業資料記錄設備可直接插入 SerDes 通訊鏈路,擷取具精準時間戳記的原始影像資料。
工程師可在實驗室環境回放這些資料集,用於分析特定場景下的系統行為,或用於訓練與驗證 AI 演算法。對自動駕駛研發而言,真實道路測試成本高且存在風險,因此可重複、可控的測試環境非常重要。
從系統整合角度來看,SerDes FAKRA 相機架構的價值不只在於高速傳輸,更在於能建立一條可預測、可驗證、可維護的影像資料管線。這個可靠的基礎,正是現代車輛與自動化系統越來越依賴即時視覺與 AI 決策時不可或缺的關鍵。
FAQ
結論
SerDes 技術是現代車用視覺系統的關鍵基礎,能在效能、可靠性與成本之間取得平衡。其典型長距離能力(約 15 公尺、視實作而定)、微秒等級的連結延遲,以及優異的抗 EMI 能力,足以支撐從基本環視到搭載 8+ 相機的 L4 自動駕駛平台。
對系統架構師而言,成功的關鍵在於整體思維:協定選擇會影響處理器整合;線材阻抗會影響訊號品質;連接器選型則決定機械可靠度。每個決策都會牽動整條影像資料鏈路的表現與驗證成本。
隨著自動駕駛從 L2 走向 L3/L4,SerDes 頻寬仍會持續提升——但核心原則不變:在車用最嚴苛的條件下,提供可依賴的高速影像傳輸。這條看似「不顯眼」的基礎設施,正是所有先進駕駛輔助與自動駕駛能力得以運作的前提,也與 AI 演算法同樣關鍵。
核心建議
- 協定選擇:重視成熟度與驗證經驗可選 GMSL/FPD-Link;若需多供應商互通與長期供應彈性,可評估採用 MIPI A-PHY。
- 傳輸媒介:同軸適合 PoC 與架構簡化;STP 更適合差分 EMI 表現與走線彈性需求。
- 連接器匹配:標準 4K 可用 FAKRA;高解析/空間吃緊可用 Mini-FAKRA;差分架構與彈性走線可用 HSD。
- 環境等級:一般外部相機以 IP67 為基準;若需高壓沖洗環境則採 IP6K9K。
- 整合最佳實務:依晶片供應商參考設計完成整鏈阻抗匹配與驗證,並使用已認證的線材/連接器組合以降低風險。