
Enabling Long-Distance, High-Speed Video Transmission for ADAS and Autonomous Driving
When autonomous vehicles travel at highway speeds, camera systems must transmit high-resolution imagery within milliseconds for AI decision-making. Achieving stable data transmission in environments with electromagnetic interference, vibration, and extreme temperatures requires specialized technology—this is where SerDes camera systems excel.
The Automotive Vision Challenge
Traditional MIPI CSI-2 interfaces, designed for short-reach interconnection within consumer devices, face a critical limitation in vehicles: transmission distance. While CSI-2 excels for compact electronics, automotive applications demand long-distance cable runs—from windshield-mounted cameras to trunk-located ECUs, often spanning the entire vehicle length. Parallel interfaces require extensive wiring and lack EMI shielding, making them unsuitable for electrically-dense vehicle environments. This is where long-reach physical layer technologies like SerDes and MIPI A-PHY become essential.
What is SerDes?
SerDes (Serializer-Deserializer) is a point-to-point communication architecture that enables long-distance video transmission in automotive environments. The technology works in three stages:
- Serialization: A serializer IC at the camera module converts parallel data from the image sensor (typically 8-16 lanes) into a high-speed serial bitstream
- Transmission: The serial data travels through a single shielded cable (coaxial or twisted pair), with typical reach around 15 meters—actual distance depends on data rate, cable quality, equalization capability, and chipset channel budget
- Deserialization: A deserializer IC at the ECU reconstructs the original parallel data format for processor input
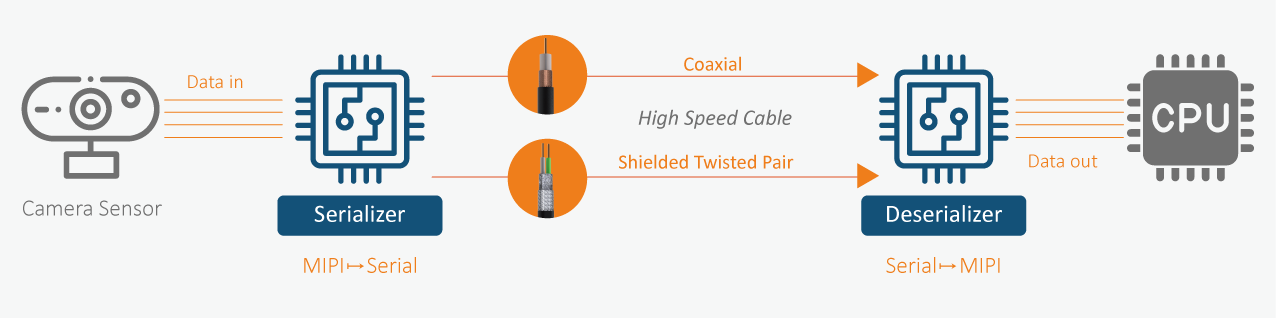
This architecture dramatically reduces cable count while enabling robust transmission in harsh automotive environments. Instead of routing dozens of parallel signal lines vulnerable to electromagnetic interference, SerDes uses differential signaling over shielded cables—resistant to noise from ignition systems, motors, and high-power electronics throughout the vehicle.
SerDes Technology Fundamentals
SerDes (Serializer-Deserializer) converts parallel camera data into high-speed serial streams for robust long-distance transmission. At the camera end, serializers encode multi-lane sensor data into single serial bitstreams transmitted over coaxial cables or shielded twisted pairs. Deserializers at the host end reconstruct parallel data for processor input—all within microseconds.
Key Advantages:
- Extended reach: Typical transmission distance around 15 meters, with potential for longer runs depending on implementation, cable specifications, and chipset channel budget
- EMI immunity: Differential signaling with shielded cables
- Bidirectional communication: Video data + control signals
- Power delivery options: Coaxial-based SerDes commonly supports PoC for single-cable power and data delivery. Differential pair architectures typically require separate power wiring, depending on platform requirements and system design.
- Low latency: SerDes link adds negligible latency (microsecond-level processing) compared to overall camera processing pipeline
Major SerDes Protocol Comparison
| Protocol | Vendor | Bandwidth | Max Distance | Key Features |
|---|---|---|---|---|
| GMSL1 | Analog Devices | 1.5 Gbps | ~15m typical | First-generation automotive SerDes |
| GMSL2 | Analog Devices | 6 Gbps | ~15m typical | Multi-camera sync, PoC support |
| GMSL3 | Analog Devices | 10+ Gbps | Depends on implementation | Next-gen high-resolution support |
| FPD-Link III | Texas Instruments | Multi-Gbps (varies by device) | ~15m typical | Native PoC, ADAS-optimized |
| FPD-Link IV | Texas Instruments | Multi-Gbps (higher rates) | ~15m typical | Enhanced bandwidth, automotive-grade |
| MIPI A-PHY | MIPI Alliance | Scalable rates | Depends on implementation | Open standard, multi-vendor support |
Note: Bandwidth values are typical link rates. Effective payload throughput depends on encoding, overhead, and system configuration.
The industry increasingly adopts open standards like MIPI A-PHY and ASA specifications to reduce single-supplier dependency and improve interoperability—critical for vehicles with 10+ year lifecycles.
Physical Layer: Coaxial vs. Twisted Pair
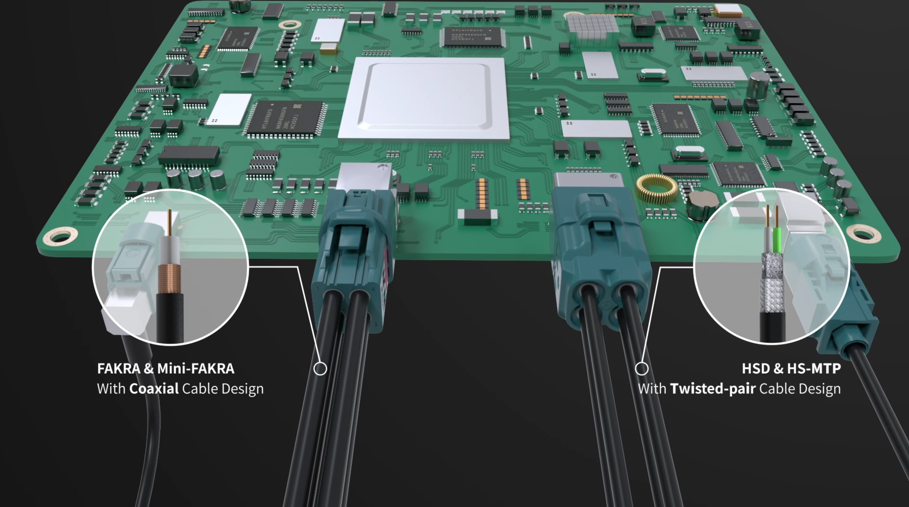
Cable selection directly impacts system performance. Coaxial cables (50Ω) provide excellent high-frequency characteristics and native PoC support, ideal for FAKRA/Mini-FAKRA systems. Shielded twisted pairs (100Ω differential) excel in EMI rejection and flexibility, suited for HSD and differential architectures.
| Parameter | Coaxial Cable | Shielded Twisted Pair |
|---|---|---|
| Impedance | 50Ω | 100Ω differential |
| Structure | Center conductor + insulation + shield + jacket | Twisted conductors + shield + jacket |
| Best For | Single-ended signaling, PoC applications | Differential signaling, high EMI environments |
| Flexibility | Moderate | Higher |
| PoC Support | Common (PoC is widely used on coax) | Possible (implementation-dependent / with design trade-offs) |
| Typical Use | FAKRA, Mini-FAKRA | HSD, high-speed differential |
Four Automotive SerDes Connectors
| Feature | FAKRA | Mini-FAKRA | HSD | HS Twisted Pair |
|---|---|---|---|---|
| Architecture | 50Ω coaxial | 50Ω coaxial | 100Ω differential | 100Ω differential |
| Frequency | Up to 6 GHz | Up to 20 GHz | Optimized for differential high-speed signaling (e.g., LVDS) | Multi-Gbps capable |
| Data Rate | Multi-Gbps (depends on system design) | Up to 28 Gbps | Variable | Variable |
| Size | Standard | 80% smaller | Compact | Compact |
| Color Coding | Yes | Yes | Optional / Vendor-dependent | Varies |
| Standard | Vehicle OEM qualification requirements (e.g., USCAR-related test expectations may apply depending on platform) | |||
| Cable Type | Coaxial 50Ω | Coaxial 50Ω | STP/Quad 100Ω | STP 100Ω |
| PoC Support | Native | Native | - | - |
| Typical Application | Standard ADAS | High-res multi-camera | LVDS cameras, infotainment, proprietary high-speed differential links | High-EMI environments |
| Temperature Range | -40°C to 105°C | -40°C to 105°C | -40°C to 105°C | -40°C to 105°C |
FAKRA (Fachkreis Automobil) connectors are widely used in coax-based automotive camera and SerDes links due to proven reliability. Their 50Ω coaxial structure supports up to 6GHz, adequate for 1080p-4K applications. Color-coded mechanical keying prevents mis-mating—critical on assembly lines where blue, green, and gray encodings distinguish GPS, radio, and camera connections.
The snap-lock mechanism provides audible confirmation and withstands continuous vibration across -40°C to 105°C. Multi-layer EMI shielding protects against ignition systems, audio amplifiers, and motor drive interference. ISO 20860 standardization ensures cross-manufacturer compatibility.
Driven by 4K/8K camera adoption, Mini-FAKRA delivers 20GHz bandwidth (28Gbps data rates) in 80% smaller form factors. This addresses dual challenges: bandwidth constraints and PCB space limitations. The integrated CPA (Connector Position Assurance) mechanism ensures complete seating—where incomplete mating can increase reflections and reduce link margin.
HSD (High Speed Data) connectors target low-voltage differential signaling with 100Ω impedance control. Paired with shielded twisted pair or quad cabling, they excel in LVDS camera links and in-vehicle high-speed differential data links. Unlike FAKRA's coaxial design, HSD's differential architecture provides superior crosstalk rejection and balanced transmission.
Compact dimensions support high-density PCB layouts while USCAR-related compliance ensures global supply chain flexibility—essential for automotive OEMs sourcing components worldwide.
Advanced applications leverage 100Ω differential twisted pair interfaces for extreme EMI environments. Their geometric structure inherently cancels external interference while superior flexibility facilitates complex routing in space-constrained systems. Common in premium ADAS platforms, industrial machine vision, and autonomous mobile robots requiring multi-Gbps transmission under harsh electromagnetic conditions.
Connector Selection Guide
| Criteria | FAKRA | Mini-FAKRA | HSD | HS Twisted Pair |
|---|---|---|---|---|
| Resolution Support | 1080p-4K | 4K-8K+ | Variable | Variable |
| Space Efficiency | ⭐⭐⭐ | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐ |
| Cost | ⭐⭐⭐⭐⭐ | ⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐ |
| EMI Performance | ⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐⭐ |
| PoC Support | Native / Common | Native / Common | - | - |
| Market Maturity | ⭐⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐⭐ | ⭐⭐⭐ |
Selection Logic:
- 1080p-4K standard systems → FAKRA (proven, cost-effective)
- LVDS/differential architectures → HSD (100Ω optimized)
- 4K-8K multi-camera platforms → Mini-FAKRA (bandwidth + space)
- Extreme EMI environments → High-speed twisted pair (maximum rejection)
Critical: Match cable impedance to connector specification—50Ω coax for FAKRA/Mini-FAKRA, 100Ω STP for HSD/twisted pair. Consult SerDes chipset manufacturer certified component lists.
System-Level View: Real-World Applications of SerDes FAKRA Camera Architectures
After understanding the underlying technologies, it is useful to examine how a complete SerDes FAKRA camera system operates from a system integration perspective.
In a vehicle equipped with a 360-degree surround-view system, four to six wide-angle cameras are typically installed around the vehicle to cover the front, rear, and side views. Each camera module integrates an image sensor and a SerDes serializer IC. Image data captured by the sensor is converted into a high-speed serial stream by the serializer and transmitted through a FAKRA connector over a 50-ohm coaxial cable.
These coaxial cables are routed through the vehicle body and converge at an electronic control unit (ECU), typically located in the central console or rear compartment. On the ECU side, each cable connects to a corresponding FAKRA interface, where the signal enters a SerDes deserializer. The deserializers are commonly integrated on a dedicated image processing board, where the serial data is reconstructed into parallel format and forwarded to the main processor via a MIPI CSI-2 interface.
This processor is often an automotive-grade computing platform designed for vision and AI workloads, featuring GPU and AI acceleration to process multiple high-resolution video streams in real time.
From a data-flow perspective, this architecture may appear complex, yet the actual end-to-end latency is extremely low. From image capture at the sensor to data availability at the processor, the delay is typically only a few milliseconds.
For ADAS applications, such low latency is critical. At a vehicle speed of 80 km/h, the vehicle travels approximately 2.2 centimeters per millisecond. Excessive system latency means that by the time an obstacle is detected by the AI algorithm, the vehicle may have already advanced several additional centimeters—potentially making the difference between a controlled stop and a collision in emergency scenarios.
In real-world deployments, SerDes FAKRA camera systems support a wide range of ADAS functions. Forward-facing cameras enable lane departure warning and adaptive cruise control by accurately detecting lane markings and vehicle distances. Side-view cameras support blind-spot detection, monitoring adjacent lanes when the driver initiates a lane change.
Rear-view cameras, beyond traditional reversing assistance, are increasingly integrated with pedestrian detection and automatic emergency braking functions.
More advanced implementations include 360-degree surround-view systems, which require real-time stitching of video streams from four or more cameras. This process goes beyond simple image compositing; it must account for lens distortion correction, mounting angle variations, and precise time synchronization across all camera inputs to generate a seamless top-down view.
Such systems are particularly valuable for large vehicles, significantly reducing collision risk during low-speed maneuvering and parking.
Notably, the application of SerDes FAKRA architectures extends well beyond passenger vehicles. In modern warehouse and logistics environments, autonomous mobile robots (AMRs) rely on robust vision systems for navigation and obstacle avoidance.
These platforms often feature cameras mounted at the front while control computers are located centrally within the chassis, creating similar long-distance signal transmission challenges. Industrial machine vision systems also increasingly adopt SerDes-based designs, especially when cameras must be installed far from control cabinets or operate in environments with high electromagnetic interference.
During system development and validation, SerDes technology also plays a critical role. Specialized data logging equipment can be inserted directly into the SerDes communication link to capture raw video data with precise time stamps.
Engineers can replay these datasets in laboratory environments to analyze system behavior under specific scenarios or to train and validate AI algorithms. This capability is particularly important for autonomous driving development, where real-world testing is costly and potentially hazardous.
From a system integration standpoint, the value of SerDes FAKRA camera architectures lies not only in high-speed data transmission, but in their ability to provide a deterministic, verifiable, and maintainable image data pipeline. This reliable foundation is essential for modern vehicles and automated systems that increasingly depend on real-time vision and AI-driven decision making.
FAQ
What transmission distance can SerDes systems achieve?
How does SerDes latency compare to parallel interfaces?
Can SerDes transmit power and data simultaneously?
When should I choose FAKRA vs. Mini-FAKRA?
What makes HSD different from FAKRA?
Are different manufacturers' FAKRA connectors interchangeable?
What happens if I use wrong cable impedance?
How do I calculate required cable gauge for PoC?
What IP rating do I need for external cameras?
Can I mix different SerDes protocols in one vehicle?
How critical is time synchronization for multi-camera systems?
What causes the most common SerDes system failures?
Will wireless replace SerDes for automotive cameras?
How does SerDes support emerging 8K automotive cameras?
Are open standards like MIPI A-PHY replacing proprietary protocols?
Conclusion
SerDes technology forms the backbone of modern automotive vision systems by balancing performance, reliability, and cost. Its typical long-reach capability (around 15 meters depending on implementation), microsecond-level link latency, and robust EMI resistance enable everything from basic surround-view to L4 autonomous driving with 8+ camera arrays.
For system architects, success requires holistic thinking: protocol selection impacts processor integration, cable impedance affects signal quality, and connector choice determines mechanical reliability. Each decision cascades through the entire video processing chain.
As autonomous driving evolves from L2 to L3/L4, SerDes bandwidth will scale accordingly—but core principles remain unchanged: delivering dependable high-speed imaging under automotive's harshest conditions. This unglamorous infrastructure enables every advanced driver assistance feature and autonomous capability, making it as critical as the AI algorithms it feeds.
Core Recommendations
- Protocol Selection: Use GMSL/FPD-Link for proven reliability; adopt MIPI A-PHY for open multi-vendor future-proofing.
- Media Choice: Coax for native PoC and simplicity; STP for superior differential EMI performance.
- Connector Fit: FAKRA for standard 4K; Mini-FAKRA for high-res/space-critical; HSD for LVDS/flexible routing.
- Environmental: IP67 baseline; IP6K9K for exposed/high-pressure wash applications.
- Integration Best Practice: Follow chipset reference designs, ensure impedance matching, certify full chain.